工艺要求
本文首先介绍了伺服系统的组成部分及结构组成,其次介绍了伺服系统的基础原理及分类,最后详细的阐述了伺服系统的性能要求、
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制管理系统。
伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角),其结构组成和别的形式的反馈控制管理系统没有原则上的区别。伺服系统最初用于国防军工, 如火炮的控制, 船舰、飞机的无人驾驶,导弹发射等,后来逐渐推广到国民经济的许多部门,如自动机床、无线跟踪控制等。
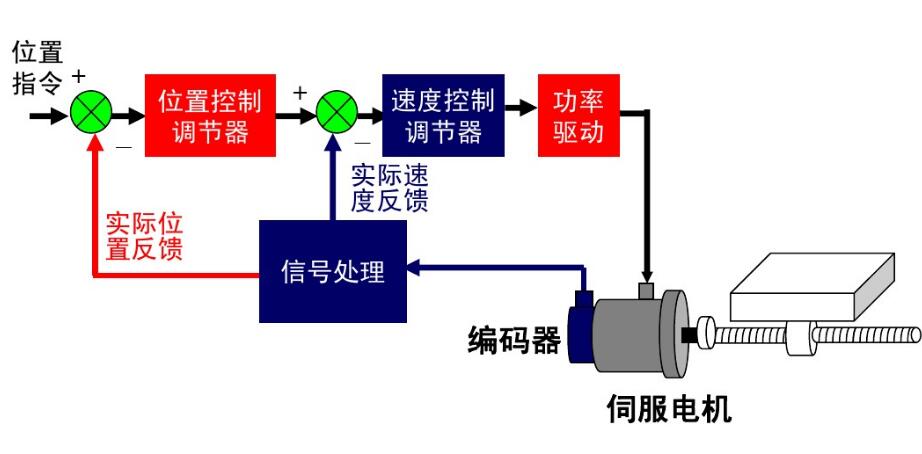
机电一体化的伺服控制管理系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制管理系统一般来说包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。下图给出了伺服系统组成原理框图。
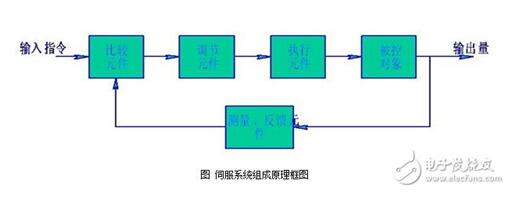
比较环节是将输入的指令信号与系统的反馈信号作比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。?
控制器通常是计算机或PI控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
执行环节的作用是按控制信号的要求,将输入的各种各样的形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
检测环节是指能够对输出做测量并转换成比较环节所需要的量纲的装置,一般来说包括传感器和转换电路。
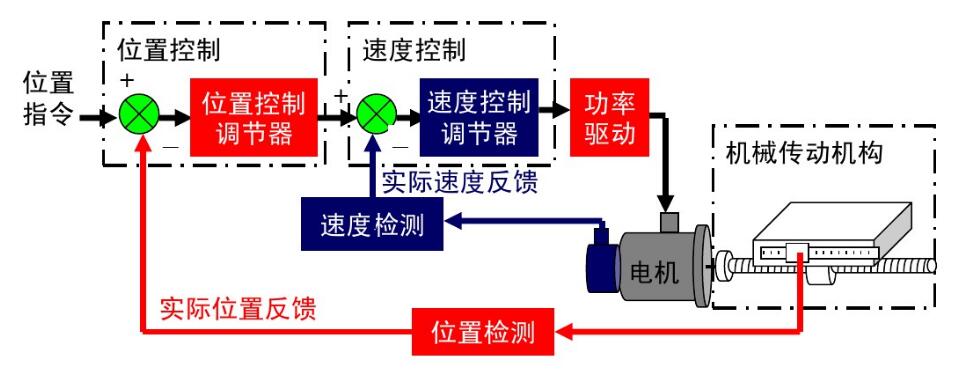
位置检测装置将检测到的移动部件的实际位移量进行位置反馈,与位置指令信号作比较,将两者的差值进行位置调节,变换成速度控制信号,控制驱动装置驱动伺服电动机以给定的速度向着消除偏差的方向运动,直到指令位置与反馈的实际位置的差值等于零为止。
开环伺服系统即无位置反馈的系统,其驱动元件主要是功率步进电机或液压脉冲马达。这两种驱动元件的工作原理的实质是数字脉冲到角度位移的变换,它不用位置检测元件实现定位,而是靠驱动装置本身,转过的角度正比与指令脉冲的个数;运动速度由进给脉冲的频率决定。
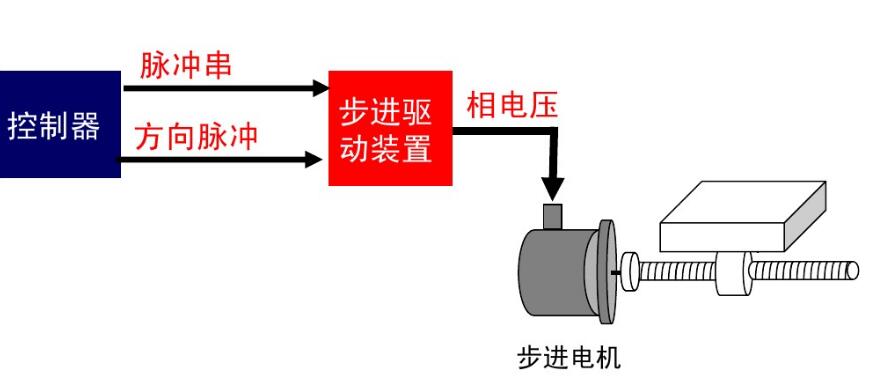
开环伺服系统的结构相对比较简单,易于控制,但精度差,低速不平稳,告诉扭矩小。通常用于轻载负载变化不大或经济型数字控制机床上。
闭环伺服系统是误差控制随动随动系统。数字控制机床进给系统的误差,是CNC输出的位置指令和机床工作台(或刀架)实际位置的差值。闭环系统运动执行元件不能反映运动的位置,因此就需要有位置检测装置。该装置测出实际位移量或者实际所处的位置,并将测量值反馈给CNC装置,与指令作比较,求得误差,依次构成闭环位置控制。
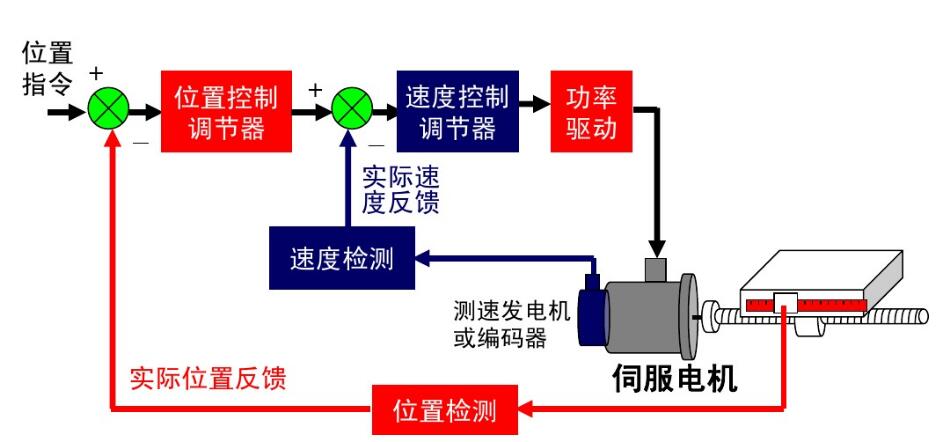
由于闭环伺服系统是反馈控制,反馈测量装置精度很高,所以系统传动链的误差,环内各元件的误差以及运动中造成的误差都能够获得补偿,从而大幅度的提升了跟随精度和定位精度。
位置检测元件不直接安装在进给坐标的最终运动部件上,而是中间经过物理运动部件的位置转换,称为间接测量。亦即坐标运动的传动链有一部分在位置闭环以外,在环外的传动误差没有正真获得系统的补偿,因而这种伺服系统的精度低于闭环系统。
半闭环和闭环系统的控制结构是一致的,不同点只是闭环系统环内包括较多的物理运动部件,传动误差均可被补偿。理论上精度能够达到很高。但由于受机械变形、气温变化、振动以及其它因素的影响,系统稳定性难以调整。此外,机床运行一段时间后,由于物理运动部件的磨损、变形以及其它因素的改变,容易使系统稳定性改变,精度发生明显的变化。因此,目前使用半闭环系统较多。只在具备传动部件紧密度高、稳定性很高、使用的过程温差变化不大的高精度数字控制机床上使用全闭环伺服系统。
稳定性好:作用在系统上的扰动消失后,系统能够恢复到原来的稳定状态下运行或者在输入指令信号作用下,系统能达到新的稳定运作时的状态的能力,在给定输入或外界干扰作用下,能在短暂的调节过程后到达新的或者回复到原有平衡状态;
精度高:伺服系统的精度是指输出量能跟随输入量的精确程度。作为精密加工的数控机床,要求的定位精度或轮廓加工精度通常都比较高,允许的偏差一般都在 0.01~0.00lmm之间;
快速响应性好:有两方面含义,一是指动态响应过程中,输出量随输入指令信号变化的迅速程度,二是指动态响应过程结束的迅速程度。快速响应性是伺服系统动态品质的标志之一,即要求跟踪指令信号的响应要快,一方面要求过渡过程时间短,一般在200ms以内,甚至小于几十毫秒;另一方面,为满足超调要求,要求过渡过程的前沿陡,即上升率要大。
节能高:由于伺服系统的快速相应,注塑机可以依据自身的需要对供给进行快速的调整,能够有效提升注塑机的电能的利用率,进而达到高效节能。
衡量伺服系统性能的主要指标有频带宽度和精度。频带宽度简称带宽,由系统频率响应特性来规定,反映伺服系统的跟踪的快速性。带宽越大,快速性越好。伺服系统的带宽主要受控制对象和执行机构的惯性的限制。惯性越大,带宽越窄。一般伺服系统的带宽小于15赫,大型设备伺服系统的带宽则在1~2赫以下。自20世纪70年代以来,由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线赫,并成功应用在远程导弹、人造卫星、精密指挥仪等场所。伺服系统的精度主要决定于所用的测量元件的精度。
因此,在伺服系统中一定要采用高精度的测量元件,如精密电位器、自整角机、旋转变压器、、光栅、磁栅和球栅等。此外,也可采取附加措施来提高系统的精度,例如将测量元件(如自整角机)的测量轴通过减速器与转轴相连,使转轴的转角得到放大,来提高相对测量精度。采用这种方案的伺服系统称为精测粗测系统或双通道系统。通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

种专门用来检测和测量材料应变变化的仪器。它可以精确地测量物体的应变变化,并将这些变化转化为电阻值的变化。电阻应变仪通常由下面这
的核心设备,它负责管理门禁设备和用户权限信息。门禁控制器连接到门禁读卡器和门锁等设备,并按照每个用户的身份验证结果控制门的开启和关闭。 2. 门禁读卡器:门禁读卡器用于读
包括电池管理器、电池监控器、电池保护器、电池均衡器和电池充电器等。下面我们将逐
是工业自动化控制项目里经常要用到的执行机构。啥是执行机构,就是实际动手干活的那
的? 在数字电路实验中,需要用若干仪器、仪表观察实验现象和结果。常用







 日期 : 2024-06-15
日期 : 2024-06-15 


