工艺要求
既可独自作业,又可一起作业的要求,采用了多单片机组成的分布式通讯网络,通过RS-232通讯接口,直接承受PC的统一办理。考虑到本钱问题,选用了性价比很高的AT89C2051单片机I/O端口及能够在PC上进行通讯的UART通讯端口。
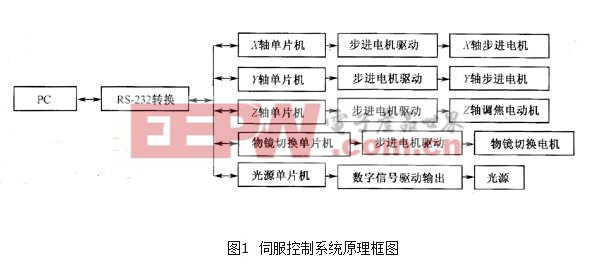
在电机驱动操控办理体系中,用四个步进电动机别离操控显微镜载物台在X轴和y轴方向上的平面运动,在Z轴方向上的调焦运动与物镜的挑选切换。每一个步进电动机用一个AT89C⒛51单片机来独自办理其运作时的状况及移动的方位,其驱动环节电路框图如图1所示。和y轴两个方向上的开环位移来操控;可通过计算机图画的灰度值闭环操控物镜的上下移动,以完结主动调焦;物镜转换器可主动切换;通过载物台在X轴和y轴两个方向上的二维移动,再加上在Z轴方向上的实时主动盯梢调焦,可完结对调查物(切片或培养皿)进行实时扫描,使整个调查进程能显示出明晰的图画;通过预先设定载物台的运动规矩,使显微镜能按程序调查到规则的视场;通过快速挨近(相当于粗调)或精密调理(相当于微调)两种方法可主动准确调焦和主动盯梢调焦(调焦精度小于0.5 gm);单片机操控电路和计数脉冲及在X轴和y轴两方向上的重复定位精度(0.02 mm)能满意医学临床查验的需求;可联网进行长途遥控显微镜,以利于医学学术沟通或教育沟通。
伺服操控办理体系的原理框图如图1所示,图中的虚线框是显微镜的伺服操控办理体系,它通过分布式微操控器体系网络来驱动显微镜渠道的准确运动,具有主动准确调焦和主动盯梢调焦的功用。
由CCD收集到的图画经图画收集卡送入计算机,PC依据算法剖析当时图画的明晰度。若图画不是最明晰的,则PC通过RS-232通讯端口发送调焦指令送给微操控器体系,微操控器体系把相应的操控信号传送给Z轴调焦电机,由Z轴调焦电动机推进调焦组织做相应的运动,然后改动图画的明晰度。如此重复的由PC与伺服体系一起效果,直至找到图画最明晰的方位停止,然后完结主动准确调焦的全进程。由PC发送指令,通过操控x轴和y轴步进电机的运动可改动调查视场。在改动视场的进程中,PC主动盯梢图画的明晰度,以确保物镜处于最佳成像方位。







 日期 : 2024-07-28
日期 : 2024-07-28 


