工艺要求
实验室机器人中的夹具用于自动化移液、分类等任务,新开发的四伺服夹持器能灵活处理不同大小和形状的实验室器具,适用于多种自动化系统。
夹具在实验室机器人技术中很重要,因为它们允许机器人以精确和受控的方式处理物体和样品。它们能实现移液、分类和运输样品等重复任务的自动化,从而最大限度地减少人为错误并提高效率。夹具可以以可重复且精确的方式执行运动,这对于确保结果一致的研究和分析很重要。有不一样的夹具(例如机械夹具、真空控制夹具或磁性夹具)能适应不同的要求。
生命科学中的自动化系统对灵活性有很高的要求。特别是中小型公司的需求和应用程序经常变化。因此,灵活系统的开发还需要通用夹具,除了经典的微量滴定板之外,还可以处理其他实验室器具形式,包括单个样品。
实验室中的经典实验室器具包括从标准化微量滴定板到具有不同直径和体积的圆形实验室容器。为了让机器人安全地抓取圆形实验室容器,需要三个部件作为手指。然而,对于矩形实验室载体,需要额外的组件,因为这里需要四个手指。
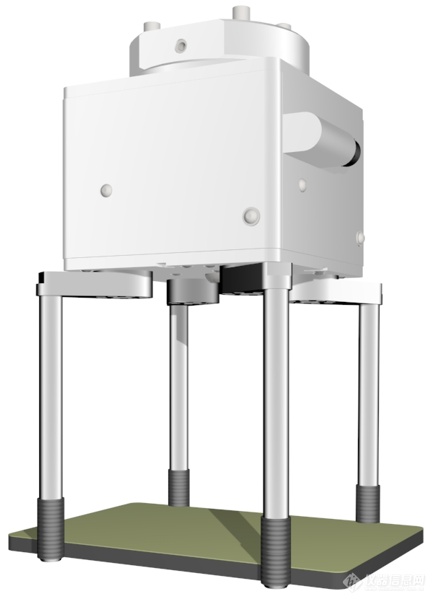
图 1 四伺服夹持器开发的四伺服夹持器的机械结构遵循最小重量、紧凑尺寸、易于维护和通用适用性的规格。使用高质量的组件保证了长期的可靠性。夹持器的核心包括四个伺服电机(Robotis Dynamixel XH430-W350-R),它们可以对称或不对称地打开和关闭,从而能够夹持不同类型的实验室器具。所使用的伺服电机具有金属外壳和精密轴承,并且根据应用可以使用长达100mm的手指长度。只有四个额外的轻质特殊部件,由铝制成的外壳和四个手指,创造了一个通用机器人夹持器,可以运输尺寸差异高达120mm、最大2.5kg的圆形和方形物体。自重约为600g,尺寸83×83×63mm(长×宽×高,不含手指重量)。底板定位伺服电机,吸收产生的力,并通过支撑元件将它们传递到上外壳板和连接的法兰。该法兰符合“ISO 9409-1 — 工业机器人 — 机械接口”,因此可用于任何标准化机器人。铝制外壳可保护伺服电机和控制电子设备免受机械损坏、灰尘和液体介质的影响,并确保热稳定性。与机械支撑部件一起,外壳还可以确保防止意外的轻微碰撞。抓手手指具有旋转对称形状,适合常规应用。单螺钉连接与圆形配合相结合,可以快速轻松地更换手指。根据手指几何形状的设计,抓取过程可以设计为正向或非正向的。有两种不同的版本用于控制夹具。不带集成控制的版本具有 RS485 接口,可通过 PC 直接控制伺服系统。为此,已经实现了 Windows 下 Universal Robots 机器人的实现以及 Windows 和 Linux 下 Franka Emika 机器人的集成。
第二个版本具有集成控制系统,支持通过RS232或USB接口进行控制。两个版本都实现相同的功能。
由于四个手指不是机械同步的,因此在软件中实施了额外的速度和位置控制,以确保手指在抓取时同步移动,尤其是在较小的力的情况下。当前的软件可以在握住实验室器具时改变夹持力,例如,使其更容易将其放置在导轨中。该抓手目前支持七种不同的抓握模式,其中抓握和定位手指之间存在区别。抓握方式可分为从上方对称抓握和从侧面对称或非对称抓握。当抓握矩形形状时,会区分两个额外的手指位置,以适应较小的空间条件。控制夹具需要参数模式、位置、到中心的距离和夹持力。提供各种状态信息,例如手指位置、夹持力、电源电压和错误数据。此外,伺服系统的位置控制和更高级别的位置控制可以进行参数化,以最佳地适应不一样的手指和磨损。
开发的夹具主要用于集成到自动化系统中,这些自动化系统对要处理的实验室器具的要求一直在变化,或者必须在一个应用程序中处理不同的实验室器具格式。例如,它被用于自动向ICP/MS 供应样品的系统中。待测量的样品装在密封的 50 mL 离心管中供系统使用,该离心管必须由机器人抓取,转移到封盖机,并在自动打开后转移到测量系统的自动进样器。较小的样品管放置在具有微量滴定板足迹的架子上;转移前必须取下现有盖子(MTP 格式)。在该系统中,夹具必须处理各种尺寸的圆形离心管以及盖子(圆形或板状)。模拟夹具用于复杂的系统中,以实现材料研究中结晶过程的自动化。它可处理直径为 27mm的单个小瓶及其盖子、MTP 格式的盖板以及紧凑型样品架的运输。这里的一个特殊应用是旋转整个样品架(质量:550 g)以将晶体转移到测量板上。
开发的夹具可灵活用于不同的应用,并可从上方或侧面进行抓取。对于圆形实验室器皿,从上方抓握时,要抓握的实验室器皿的尺寸在 9 mm到 110 mm之间。矩形实验室器皿可以从上方对称或不对称地抓握,尺寸可以在 1 mm到 98 mm宽之间。抓手手指能适应相应的应用。
机械手的模块化和机械简化结构开辟了减少手指数量(两个或三个手指)以及将手指数量增加到五个或更多的设计选项。使用相关的和必要的电子和软件修改,可以将该夹具转换为许多特殊应用。可互换的外壳材料能够完全满足耐腐蚀和清洁(洁净室)的进一步要求。
这项工作是在 ERC 项目“先进材料自主开发”(ERC 856405)的框架内进行的。作者还感谢 Heiko Engelhardt 先生的支持。







 日期 : 2025-01-14
日期 : 2025-01-14 


